计图开源:三维点云配准算法库(JPCR)
Part1
概述
本次开源的算法库将GeoTransformer[1] (刚性点云配准)、GraphSCNet[3](非刚性点云配准)与MIRETR[4](多实例点云配准)等工作整合。相关开源代码与预训练模型的链接为:
https://github.com/zhiyuanYU134/JPCR。
Part2
工作介绍
GeoTransformer已经成为点云配准领域的代表性方法,基于本次发布的代码模型,研究人员能够快速实现RoITr、OIF-PCR、PEAL等后继方法,为相关方向研究提供了便利。
基于计图框架,GeoTransformer的模型参数量降为PyTorch框架下模型参数量的70%。
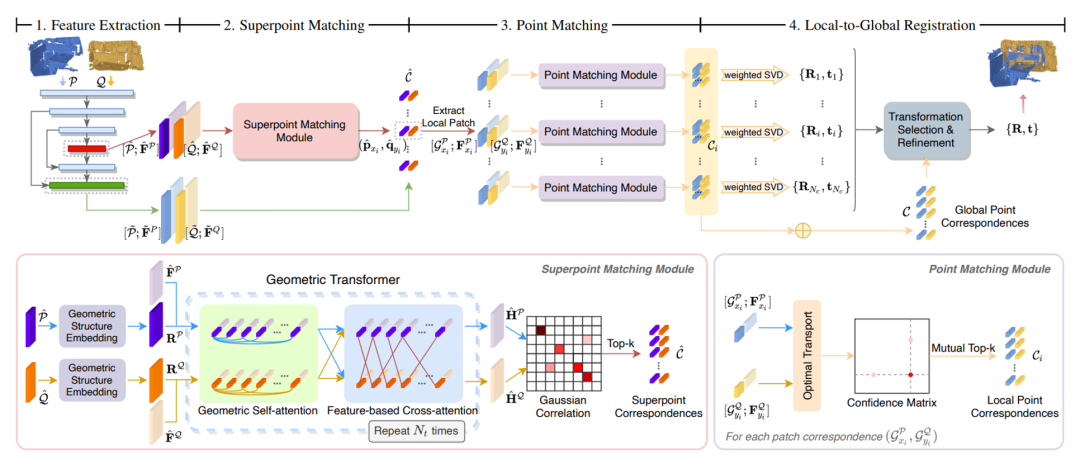
图1 GeoTransformer的网络架构
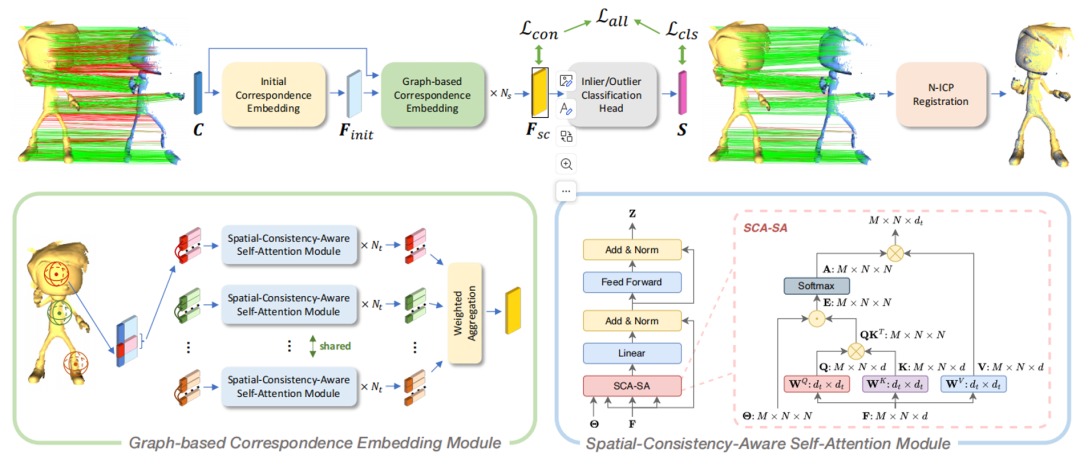
图2 GraphSCNet的网络架构
MIRETR[4]:此工作针对场景点云中存在多个待配准实例的多实例配准问题。MIRETR是一个以从粗到细的方式提取实例感知对应关系的多实例点云配准方法。在粗略层面,MIRETR共同学习实例感知的超点特征,并预测每个实例的掩膜。基于实例掩膜,MIRETR可以将来自目标实例外部的超点影响降到最低,从而提取出可靠的超点对应关系。然后,根据实例掩膜将超点对应关系扩展到细致层面的实例候选对象,在此实例候选对象上提取点对关系。最后,MIRETR使用一个高效的候选对象选择和细化算法来获得最终的配准结果。在三个公开基准测试上的广泛实验证明了MIRETR的有效性。
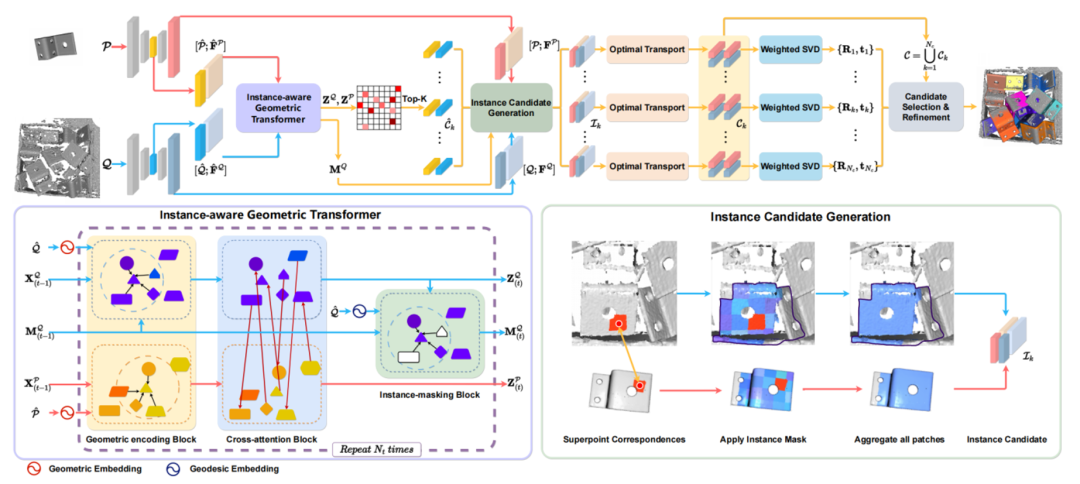
图3 MIRETR的网络架构
Part3
结果展示
GeoTransformer[1]在3DLoMatch数据集上的配准效果:相较于vanilla self-attention,geometric self-attention可根据点云中的几何关系更有效地拒绝异常匹配,提升配准成功率。
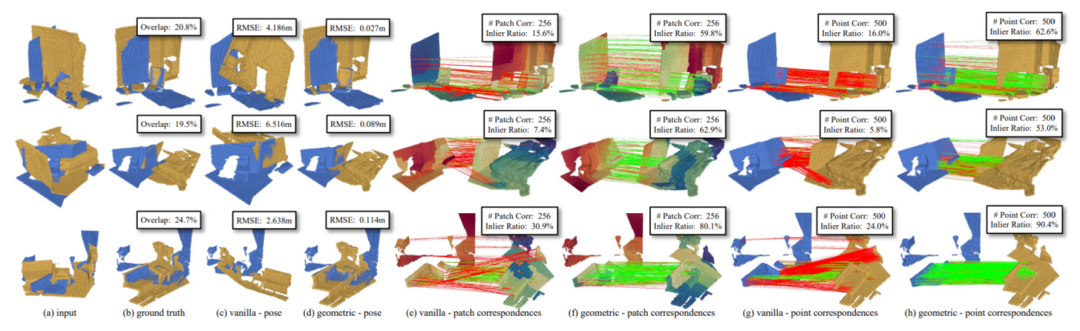
图4 基于GeoTransformer的低重合配准结果可视化
GraphSCNet[3]在4DMatch数据集上的配准效果:GraphSCNet在低重叠和大变形场景中展现了更好的异常值去除结果,并实现了更好的配准结果,成功恢复了非重叠区域中的几何形状。
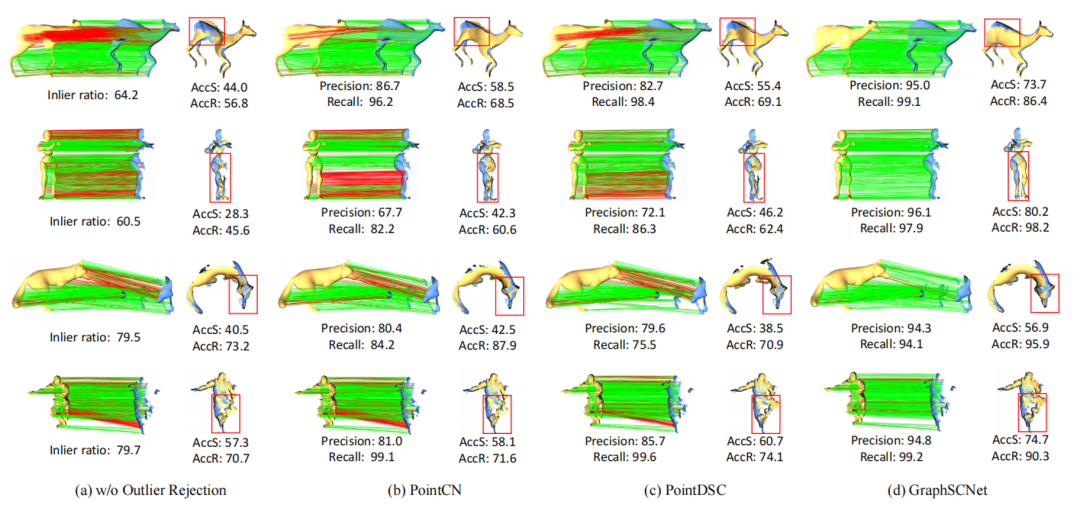
图5 基于GraphSCNet的非刚性配准结果可视化
MIRETR[4]在ROBI数据集上的配准效果:得益于实例感知的对应关系提取机制,MIRETR获取到了更高质量的对应关系,在堆叠、遮挡场景配准出了更多实例。
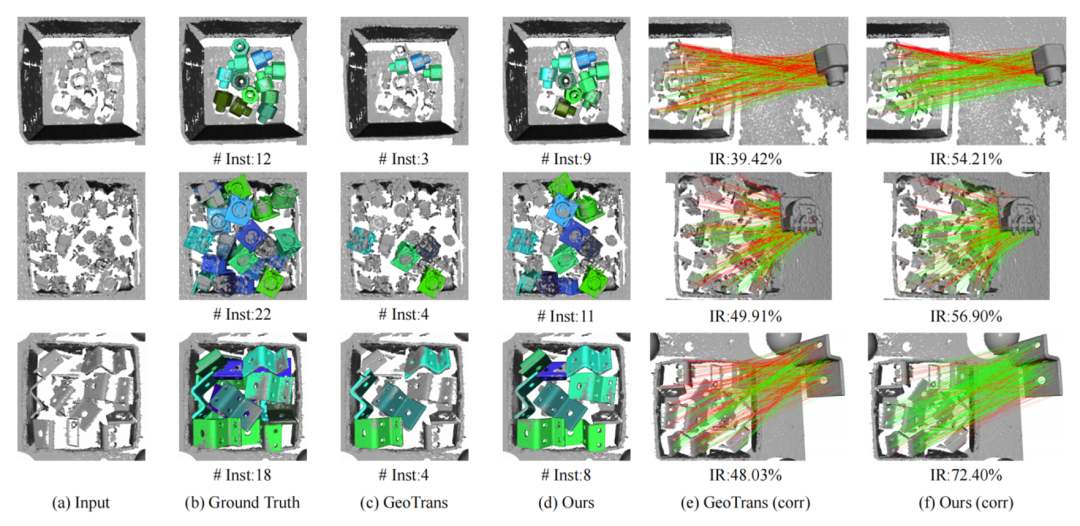
图6 基于MIRETR的多实例配准结果可视化
Qin Z, Yu H, Wang C, et al., Geotransformer: Fast and robust point cloud registration with geometric transformer, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(8): 9806-9821.
Yu H, Li F, Saleh M, et al., Cofinet: Reliable coarse-to-fine correspondences for robust pointcloud registration, Advances in Neural Information Processing Systems, 2021, 34: 23872-23884.
Qin Z, Yu H, Wang C, et al. Deep graph-based spatial consistency for robust non-rigid point cloud registration, Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 5394-5403.
Yu Z, Qin Z, Zheng L, et al. Learning Instance-Aware Correspondences for Robust Multi-Instance Point Cloud Registration in Cluttered Scenes, Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, 19605-19614.
2. 童欣、Minhyuk Sung分获亚洲图形学学会2024年度两项大奖
4. 计图开源:多场景“低慢小”目标感知理解库(Anti-UAV)